A quick post to show the results of this weekend prints on the Ultimaker. 4 parts of the inMoov shoulder. Please visit www.inmoov.fr for the designer of the inMoov robot.

A quick post to show the results of this weekend prints on the Ultimaker. 4 parts of the inMoov shoulder. Please visit www.inmoov.fr for the designer of the inMoov robot.

Hello World,
The SwanRobotics website has moved from Drupal to WordPress, but the information is not there yet. During the coming weeks I will publish the old information of the previous website. On this website some links have other names or no longer exists. Please use the search box on the left side. Thanks for your patience.
Regards,
Mark
Finally I have some progress on my inMoov robot. In my last I described a method to hack servos for the shoulder and the arm, but my inMoov Torso was still headless. The robot has a head now. Yes!!




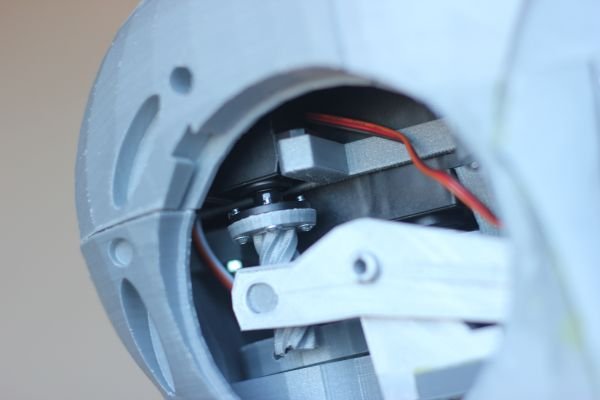
The head of the inMoov robot has a lot of parts. Not only at the outside, but internally there is a mechanism with servos to control the eye and the jaw movement. This needed some tweaks to make it work. First of all I had the wrong servos and these didn’t fit as easy as I expected. The Dremel was needed to make the holes for the servo bigger and another shape. At the end I probably should have designed a new one, but this will do for now

Second problem I had, was the mount of the vertical eye movement. The servo arm was too short. I tried everything, but it stayed to short. Finally I designed a new one that was fitted snugly.

As you can see the inner parts aren’t very nice. These actual where the first few parts I printed with my Ultimaker. I used a raft with the print and that isn’t the best method. Now I use a rim to protect the print from warping.

At the back of the Neck you see the wires coming out. I used extension wires to make the cable of the servo longer. To guide the wire trough the head I used Tyraps and hot glue. This should protect them from getting stuck between the moving parts.



The inMoov Robot needs a lot of servos. You need multiple servos for the head, shoulders, arms and fingers. The designer Gael Langevin is now developing the hips so we even need more servos (It’s worth it) In most cases we can use standard servos to control various parts of the body. For parts that require a little more torque Geal designed a worm wheel to create more torque. A normal servo can turn for example only 180 degrees and that is sufficient in most cases. The worm wheel has to turn more than the 180 degree a standard servo offers, so we need to modify the servo.
In this example we use a HS805BB+. This is a big and an expensive servo, so be careful and be sure about what you are doing.
Remove the white disk from the servo spline.

Remove the 6 screws at the bottom of the servo. The bottom plate and the top plate should come off.


Remove the gears one by one and place them in the right order to put it all together later. As you can see on the picture I put them on the bench the same way as they were on the servo.


Now its time to remove the motor and electronics from its housing. Hold the servo and gently tap the casing at a small angle on the table at the side where the motor is. After a few gentle taps the motor and the electronics should come loose. If this isn’t working, you can use a screwdriver to push on the axle of the motor at the top side.
Remove the screw on the potentiometer to remove the motor unit.

Cut the wires from the servo. Be sure that you keep enough length to solder new wires on to the existing ones. You also can solder new wires on the PCB, but I didn’t do this.


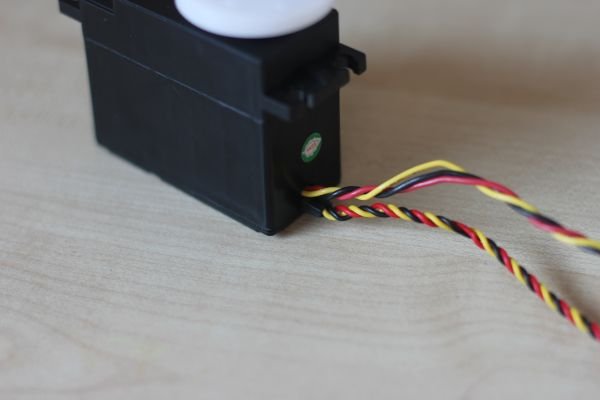
Solder new wires from about 25 cm, at the side of the PCB. In my example I used black instead of the green wire. To protect the wires from touching the metal parts use crimp sockets on each wire.
I also used a crimp socket around these crimp socket to prevent the wires come loose when you pull the wires.


Solder the potentiometer on the new wires. Use the right order to connect them. Sometimes it has to be different than the original connection, because of the different direction from the left and right arm.
Twist the wires from the potentiometer to prevent interference.

After this I tested the servo without the casing. Don’t let anything touch the electronics.
After the electronics the hardware should be changed. On the gear with the outgoing axle is an end tab. I used the Dremel to remove this plastic end tab. You can also use a knife but be careful with that.
You also need to remove a piece of the casing to run the wires through. In this example I made a hole next to the existing hole. You can also make the existing hole larger to have the wire on top of each other. It depends on you want need.

Put it all together again and test your hack.

Good luck.
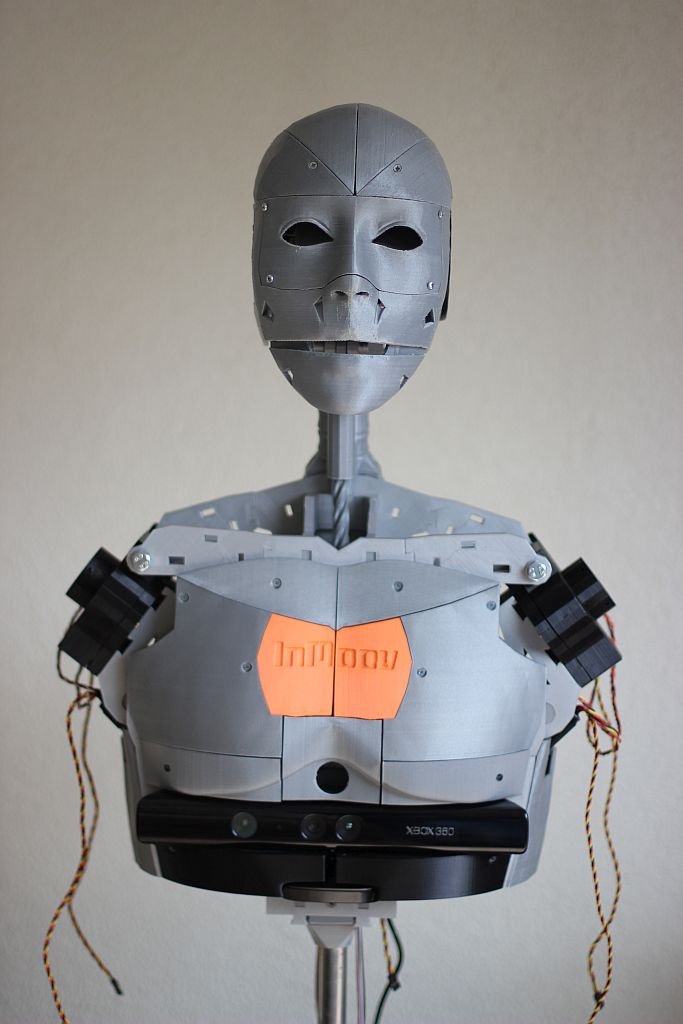
All the parts of the InMoov torso are ready and I have put it together.
Yes!!!! The torso is the main body part of the InMoov because the head and the arms are attached to it.

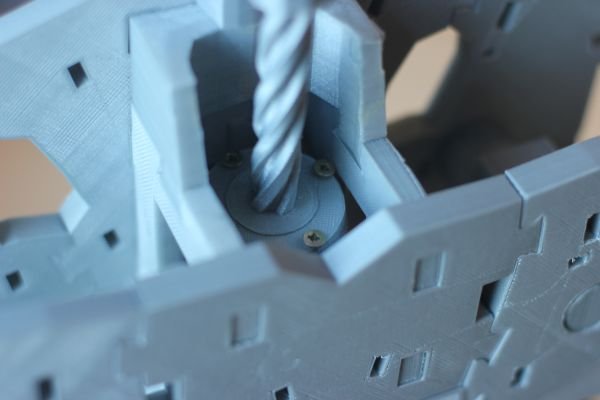
To make the torso stand up I used the two part stand holder from http://www.thingiverse.com/thing:44452. I want to mount the Kinect and this part make this possible and is robust enough. Those two parts are glued together. The metal pipe is 22 mm and is 1 meter long.
The hole in stand holder part is slightly smaller so I used a 22 mm drill to make it bigger.

At the bottom I used two pieces of wood I had lying around and used some screws and glue to mount it together.

This construction will not be stable enough when moving the arms. For now it’s enough because a lot of printing is required to finish the arms.
While printing the arms I can complete the head and mount the Kinect. Some extra pictures of the torso.


Make sure you take a look at the website from InMoov at www.inmoov.fr
Slowly but surely the InMoov torso is taking shape. There are a lot of parts to print. I damaged my Ultimaker printer by pulling to hard at the filament. I had to wait for spare parts, but I am printing again. In the pictures you can see the torso with only three parts missing at the back side.
I will be happy if this is done, so I can mount the torso on a stick and the head on top of it. The part fit together very well without a lot of modifying afterwards. Please take a look at the original designer of the inMoov robot. www.inmoov.fr




While printing the inMoov robot I made some progress on BOB the Biped. This is an open source project build by K.Biagini. You can find it at http://www.instructables.com/id/BoBtheBiPed/
To build BOB you have to print 6 parts on a 3D printer. BOB has four servo’s. Two for each leg and is powered by 4 AAA sized batteries.
Part list
Printing the parts
BOB has only 6 parts. The base plate, the head, two brackets and two foots. I used a Ultimaker printer to make the parts and took a day to print. I am planning to make two of them. One red and one pink. I have two daughters. The parts have a tight fit so you need to sand it down a bit.

Mounting the parts
I used small servo’s from Tower Pro. There are three screws in the package. I used two to mount the servo lever to the L-shaped bracket. The four spare screws from the four servo’s are used for mounting the two servo’s on the feet. I used hot glue to fix the servo’s to the base plate.

As you can see on the photo, I soldered a 3 pin connector on the wires of the servos.
As always I print only during the daytime. The Ultimaker 1 is a fine printer, but it produces just too much noise to print at night.
The inMoov Robot has a lot of part. Below the progress of the printing a few weekends. I think my robot is not ready in a few weeks, but is coming along. Just print, print, print……

(Maybe I should purchase the Ultimaker 2. Less noise)
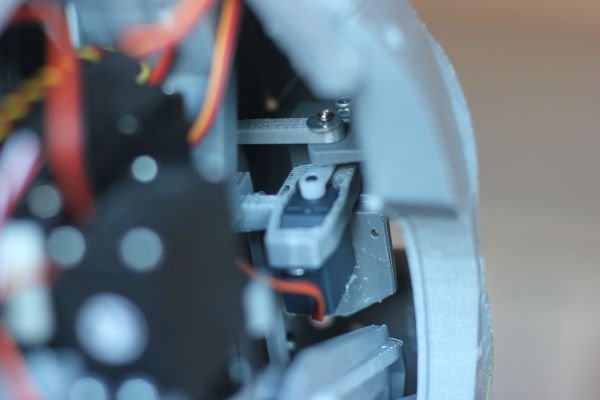
To complete my inMoov head I had to do two things. Mounting the jaw with its servo and the eye mechanism. The jaw part is done now and it is working fine.
The servo has to turn just a little bit to open and close the jaw completely. It’s quite smooth. I have used a cheap Modelcraft
RS2 servo. I am not sure how long this will work, but it good for now. The servo is mounted with four 2,5mmx8mm TORX self tapping screws with a small ring at the head. There are just bigger than the mounting holes of the servo. I don’t like it but it will hold.

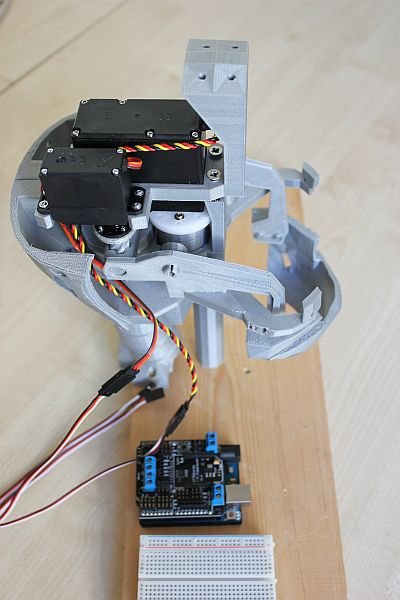
On the picture you can also see the bigger servo for turning the head from left to right. It’s a HS805BB Mega Quarter Scale servo from Hitec. One side is mounted with M3 bolts and nuts. On the opposite side I used phillip head screws I had lying around because your can’t use bolts in those holes.
Gael Langevin is the designer of this robot. Be sure to visit his website
at http://www.inmoov.fr/
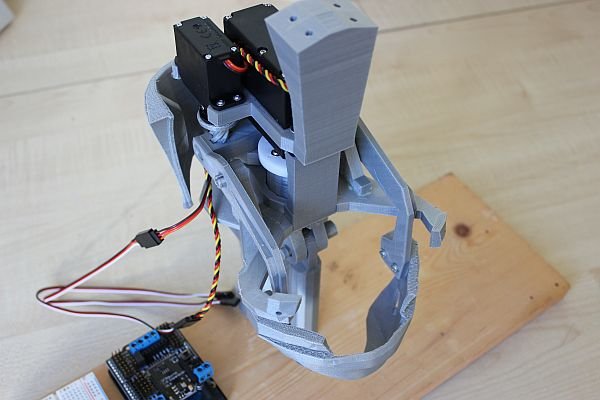
I have made some progress on the inMoov Robot head. All the parts fit nice. I was really surprised by the result, because it’s a large print with a lot of parts. Applause for Gael Langevin the designer of this robot. Be sure to visit his website at http://www.inmoov.fr/

As you can see I left some screws out because the next thing I want to add is the jaw mechanism and the Servo for the rotation of the head.

