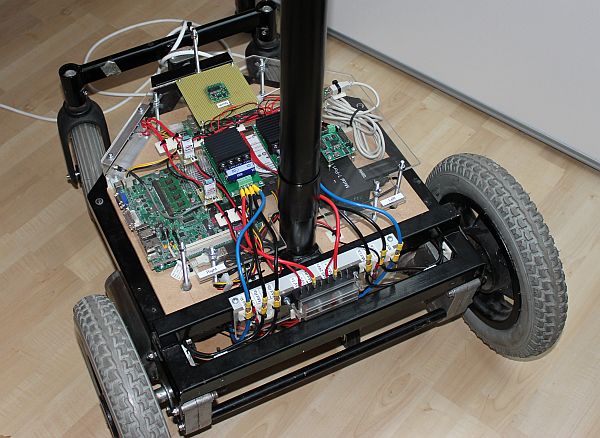
At the moment I am building a robot. This robot is my biggest robot yet and is build on top of an old wheelchair frame. The wheelchair was totally striped down and only the frame, wheels and motors where left. From this starting point it should become a telepresence robot with some ‘intelligent’ capabilities.

Robot Frame
I started with this machine a year ago and still working on it. During the progress I made notes, pictures and videos, but didn’t make a nice page out of it. In this article I try to reverse engineer the building process and show what this project is all about. The robot is not done yet so this page will probably will change during time.



As stated earlier this robot will be a telepresence robot. The robot should be controllable through the Internet within a web browser. The robot will be constructed from commercial components like a motherboard from Intel, motor drivers from Devantech and parts from a D.I.Y.shop. This will keep the building process easy and the focus should be on the software part.
The electronics
Processor board
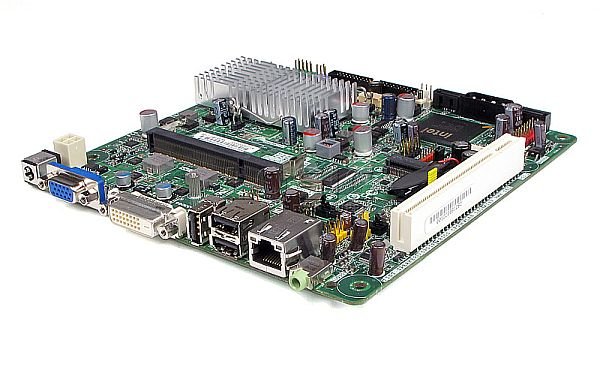
Intel Mini ITX D945GSEJT with 1 GB of internal memory and a 160 GB 2,5″ 5400 SATA hard drive.
It has an 1.6 GHz Intel Atom N270 fan less processor and has a very low power consumption.
Motor drivers
The robot is running on a wheelchair base. The base has two wheelchair motors, but the labels where gone. After doing some experiments with those motors to find out what current is flowing I choose for the MD03 from Devantech. You can control the driver in Analog Mode, RC Mode and in I2C mode. We need one MD03 motor driver for each motor. On the picture below you can see the processor board on the lower deck.


Compass
To see in which direction the robot is standing or moving I use a use the CMPS03 Electronic Compass Module from Devantech. This module has also an I2C interface to read the direction. See the test project for this module under Projects.

USB to I2C
The motor drivers and the compass module is working with I2C. To make this communicate with the Processor board I use the USB-I2C module from Devantech.

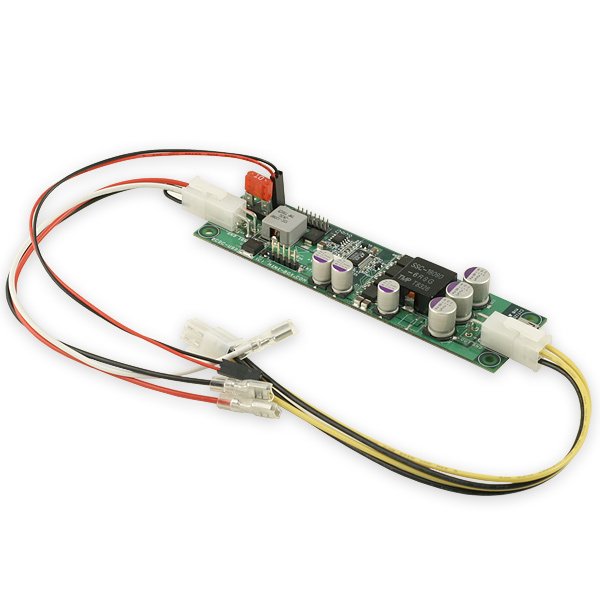
Power supply Processor board
The processor board is using 12 Volt and the motors are using 24 volt the battery power is 24 Volt. To use the board on 24 V and to protect it, the robot has a DCDC-USB Intelligent DC-DC Converter with USB interface. This unit has a high power output and a wide range input (6-34V).