This weekend my Ultimaker delivered 4 parts. The first part was the LowarmsideV1. I also did this part last weekend, but now I printed it with a square potentiometer mount. The designer of the inMoov, Gael Langevin pointed me to this piece on www.wevolver.com last week. You can find this design on Thingiverse at www.thingiverse.com/hairygael/collections/inmoov-parts-and-derivatives. I like it, because with the left arm I had to modify the hole with my Dremel.

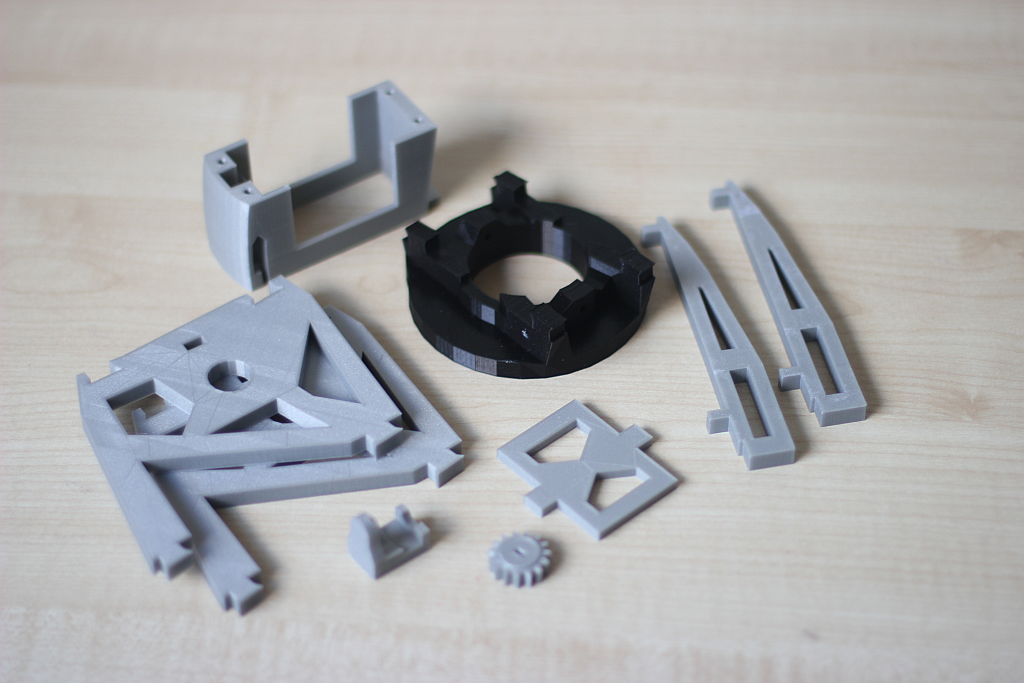
In the picture above you can see from left to right and from top to bottom the following pieces.
- elbowshaftgearV1
- robpart5V3
- LowarmsideV1
- pistonbaseantiV1
The robpart5V3 is a part for the lower arm and took me over 11 hours to print. I want a nice result so it takes a while. The result is nice. I only removed the print support from the robpart5V3. The parts came out the printer as shown on the picture.
Be sure you check the website from Gael Langevin at www.inmoov.fr.