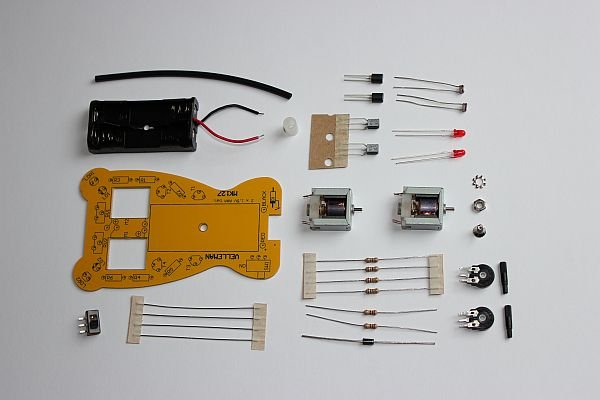
The holiday last week gave me the opportunity to shop in a little electronics, RC and other things store. I bought a microbug kit (MK127) from Velleman for almost 12 Euro. After doing complex robot things it was time to do a simple project and make my kids enthusiastic about robotics.
The electronics basically exists of two separate circuits each driving a motor to make sure the microbug is moving towards the light. The kit contains everything you need make this microbug work except for the batteries. You need a soldering iron, a screwdriver and a file.
I didn’t like the instruction because it’s a little bit messy, but everything is on there. Just place the components on it from small to big and use the soldering iron. The tricky thing is mounting the motors.
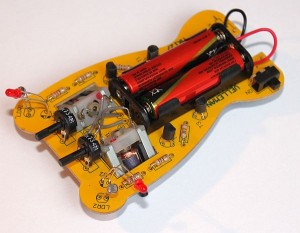
They need to be roughened after which you can fix them with solder. Make sure you mount them with the right side up, because I didn’t. The polarity of the motors was switched and the microbug was moving away from the light. Also funny ofcourse, but this was not the expected result. When the motors are fixed it’s not easy to remove them again.

I didn’t rotate them and used gray wire to make the right connections. Those gray wires just look there tiny brain.
If you have a little experience in soldering you should be able to make it work under one hour. After that you can let the kids in with their flashlight. Of course after you tested it yourselves.